
世纪汇泽(苏州)检测技术有限公司
-
-
-
-
-
- CS101(25Hz~150kHz电源线传导敏感度)
- CS102(25Hz~50kHz地线传导敏感度)
- CS103(15kHz~10GHz天线端口互调传导敏感度)
- CS104(25Hz~20GHz天线端口无用信号抑制传导敏感度)
- CS105(25Hz~20GHz天线端口交调传导敏感度)
- CS106(电源线尖峰信号传导敏感度)
- CS109(50Hz~100kHz壳体电流传导敏感度)
- CS112(静电放电敏感度)
- CS114(4kHz~400MHz电缆束注入传导敏感度)
- CS115(电缆束注入脉冲激励传导敏感度)
- CS116(10kHz~100MHz电缆和电源线阻尼正弦瞬态传导敏感度)
- RS101(25Hz~100kHz磁场辐射敏感度)
- RS103(10kHz~40GHz电场辐射敏感度)
-
-
-
-
-
-
-
-
-
- CS101(25Hz~150kHz电源线传导敏感度)
- CS102(25Hz~50kHz地线传导敏感度)
- CS103(15kHz~10GHz天线端口互调传导敏感度)
- CS104(25Hz~20GHz天线端口无用信号抑制传导敏感度)
- CS105(25Hz~20GHz天线端口交调传导敏感度)
- CS106(电源线尖峰信号传导敏感度)
- CS109(50Hz~100kHz壳体电流传导敏感度)
- CS112(静电放电敏感度)
- CS114(4kHz~400MHz电缆束注入传导敏感度)
- CS115(电缆束注入脉冲激励传导敏感度)
- CS116(10kHz~100MHz电缆和电源线阻尼正弦瞬态传导敏感度)
- RS101(25Hz~100kHz磁场辐射敏感度)
- RS103(10kHz~40GHz电场辐射敏感度)
-
-
-
-
客户案例
CASES

服务机器人的EMI测试
发布时间:
2023-10-07 00:00
1,前言
人工智能的快速发展使得机器人行业也成了近年来的热门。机器人的电磁兼容性(EMC)是重要的产品合规性问题之一,但是在2019年之前,并没有针对机器人行业的测试标准,机器人的测试要求也是模糊的。IEC 小组委员会CISPR 于 2021 年发布了由CISPR/S AHG 3编写的有关此问题的指南CISPR/1412/INF。该指南提供了有关机器人的一些基本信息,对各类型的机器人的一些指导意见以及对机器人进行EMC测试时的一些建议。
IEC 和 ISO 的标准委员会正在研究机器人的 EMC 要求。CISPR 指南中提到了 CISPR 11、CISPR 14-1、CISPR 14-2、IEC 61000-6-2、IEC 61000-6-4。
中国国家标准管理委员会在2019年3月25日发布了GB/T 37283《服务机器人 电磁兼容 通用标准 抗扰度要求与限值》和GB/T 37284《服务机器人 电磁兼容 通用标准 发射要求与限值》,并于2019年10月1日正式实施。GB/T 37283和GB/T 37284标准适用于各类服务机器人,主要包括个人/家用服务机器人和公共服务机器人。特种机器人可以参照使用此标准。
2019年12月10日,中国国家标准管理委员会又发布了GB/T 38336《工业、科学和医疗机器人 电磁兼容 发射测试方法和限值》及GB/T 38326《工业、科学和医疗机器人 电磁兼容 抗扰度测试方法和限值》。GB/T 38336和GB/T 38326标准适用于工科医机器人,包括但不限于焊接机器人、搬运机器人、加工机器人、装配机器人、洁净机器人、医用机器人、教学和实验使用机器人等,标准不适用与无人机、玩具、娱乐机器人等。
2,术语
机器人robot
具有两个或两个以上可编程的轴,以及一定程度的自主能力,可在其环境内运动以执行预期的任务的执行机构。
注1:机器人包括控制系统和控制系统接口。
注 2:按照预期的用途,机器人分类可划为工业机器人和服务机器人
服务机器人service robot
除工业自动化应用外,能为人类或设备完成有用任务的机器人。
注 1:工业自动化应用包括(但不限于)制造、检验、包装和装配。
注 2:用于生产线的关节机器人是工业机器人,而类似的关节机器人用于供餐的就是服务机器人。
个人/家用服务机器人personal/household service robot
在家居环境或类似环境下使用的,以满足使用者生活需求为目的的服务机器人。
注:这种机器人的操作使用,通常不需要专业知识或技能,不需要特别的培训或资质
公共服务机器人public service robot
住宿、餐饮、金融、清洁、物流、教育、文化和娱乐等领域的公共场合为人类提供一般服务的商用机机器人。
清洁机器人clean robot
在一定区域内,能自主寻找或按照既定路径运行,利用程序实现指定清洁功能的器具
注:如扫地机器人、擦窗机器人。
3,通用条件
1) 工作状态
服务机器人应当依照制造商规定的典型工作状态,进行正确安装(电气安装和机械安装),并充分运行(启动和功能性试验)。
在考察的频段内,服务机器人应在产生最大发射的工作状态下进行测量,例如基于有限的预测试和正常使用条件。在典型使用和实际安装的条件下,改变测试样品的配置获得最大发射。
2) 试验配置
服务机器人应在制造商规定的典型配置下进行测量。测试时服务机器人需配置尽量多的具有代表性的功能(如运动功能、通信功能、人机交互功能、感知功能、识别功能等),若某些典型功能无法同时配置,则需单独进行测试。
4,固定式服务机器人试验布置
服务机器人应按照实际使用情况划分为台式服务机器人和落地式服务机器人进行布置。
1 ) 传导骚扰试验布置
为了测量传导骚扰,服务机器人要按下列要求通过一个或多个 AN 连接到供电电源和任何其他延伸网络 (通常, V 型人工电源网络用于电源端口,见图 1)。不论接地与否,台式服务机器人都应按下述规定放置:
a,服务机器人的底部或背面应放置在离参考接地平面 40 cm 的可操纵的距离上。该接地平面通常是屏蔽室的某个墙面或地板,它也可以是一个至少为 2 mX2 m 的接地金属平板:
注1:实际布置可以按下述方法来实现:
服务机器人放在一个至少 80 cm 高的绝缘材料试验台上,它离屏蔽室的任一墙面为40 cm;或服务机器人放在一个 40 cm 高的绝缘材料试验台上,使得服务机器人的底部高出接地平面 40 cm
b, 服务机器人所有其他的导电平面与参考接地平板之间的距离要大于 40 cm;
c,服务机器人的电缆连接如图 1所示;
d,如图1所示,那些人工电源网络是通过这样的方式放在地板上,即人工网络外壳的一个侧面距离垂直参考接地平面及其他的金属部件为 40 cm。V 型人工电源网络和 Y 型阻抗稳定网络如图1和图2所示。
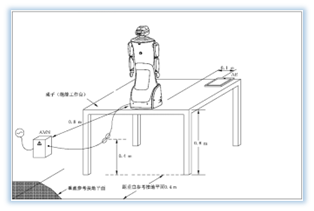
图1 台式服务机器人电源线传导骚扰测量的试验布置
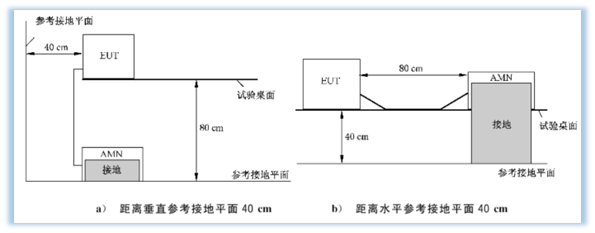
图2 服务机器人和AMN的配置
落地式服务机器人应放置在地面上,与地面接触的各点除了与正常使用时相一致以外,还要遵从上述有关布置的规定。应使用一块接地的金属板,服务机器人不应与金属板有金属性的接触,但是服务机器人本身用于接地的导体可以与这块金属板连接。该金属板可作为参考接地平面,其边界至少应超出服务机器人的边界 50 cm,面积至少为 2 mX2 m,试验布置的例子见图 3。
1.超长电缆应在其中心处捆扎或缩短到适当的长度。
2.服务机器人和电缆应与接地平面绝缘(厚度 10 cm~15 cm)
3.服务机器人连到一个 AMN上,该 AMN 可以放在接地平面上或直接放在接地平面的下方
4.电缆长度和距离允差尽可能接近实际应用。
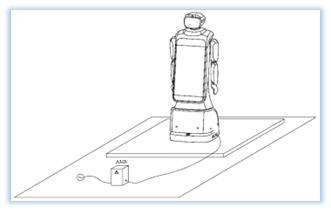
图3 落地式服务机器人的试验布置
1,距接地平板不足 40 的互连电缆,应来回折叠成长度 30 m~40 cm 的束扎起来垂落至接地平面与桌面的中间。
2,超长的电源线应在其中捆扎或缩短至适当的长度
3,服务机器人连到一个AMN上,该 AMN 也可以连接到垂直参考平面上,所有其他的设备应由第二个 AMN 来供。为了达到 0.8 m的距离,AMN 可能会需要移至边缘。
4,服务机器人和电缆应与接地平面绝缘(厚度10 cm~15 cm)
5,连接落地式服务机器人的 I/O 电缆垂落至接地平面,超长部分捆扎起来。未达到接地平面长度的电缆要垂落至车接器的高度,或离地面 40 cm,两者取低者。
6,电缆长度和距离允差尽可能接近实际应用
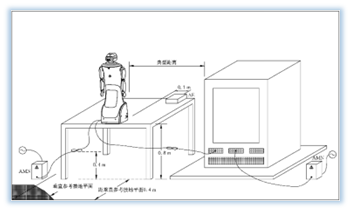
图4 组合式服务机器人的试验布置示例
2 ) 辐射骚扰试验布置
1 台式服务机器人的试验布置
作为台式服务机器人使用的机器人应放置在非金属的桌子上。桌面的大小通常为 1.5 mX1.0 m;但实际尺寸取决于服务机器人的水平尺寸。
受试服务机器人系统(包括服务机器人以及与服务机器人相连的外设、辅助设备或装置)应按正常使用情况布置。若不在正常使用情况下,试验布置时相邻单元的间隔距离应为 0.1 m。
单元间的电缆应从试验桌的后边沿垂落。如果下垂的电缆与水平接地板的距离小于 0.4 m,则应将电缆的超长部分在其中心来回折叠按 8 字型捆扎成不超过 0.4 m 的线束,以使其在水平参考接地平板上方至少 0.4 m。线缆的摆放应按正常使用情况来布置。若主输入电缆少于 0.8 m(包括主插头里的电源线路),为使外部供电部件也能置于桌上,应将主输入电缆加长。加长的电缆应和主输入电缆有一样的特性(包括导体个数以及是否接地).应被视为主申缆的一部分。上述情况中,服务机器人与辅助电气设备之间的电缆应该与服务机器人之间的电缆布置相同。
2 落地服务式机器人的试验布置
服务机器人应放置在水平参考接地平板上,其朝向与正常使用情况相一致,其金属体/物件距离参考接地平板的绝缘距离不得超过 0.15 m。
服务机器人的电缆应与水平接地参考平面绝缘(绝缘距离不超过 0.15 m),如果服务机器人需要专用的接地连接,那么应提供专用的连接点,并将该点搭接到水平接地平板上。
(服务机器人各单元之间或服务机器人与辅助设备之间的)单元电缆应垂落至水平参考接地平板,但与其保持绝缘。电缆的超长部分应在其中心被捆扎成不超过 0.4 m 的8字型线束,也可以按 S型布线。如果单元间的电缆长度不足以垂落至水平参考接地平板,但离该平板的距离又不足 0.4 m,那么超长部分应在电缆中心捆扎成不超过 0.4 m 的线束。该线束或者位于水平参考接地平板之上0.4 m或者位于电缆入口或电缆连接点高度。
3 组合式服务机器人的试验布置
台式和落地式组合服务机器人之间的电缆的超长部分应折叠成不超过 0.4 m的线束。线束的位置或者位于水平参考接地平板上方 0.4 m;或者位于电缆的入口或电缆的连接点处(如果该入口或连接点距离水平参考接地平板的间距小于 0.4 m)。
5,移动服务机器人试验布置
移动服务机器人的工作状态分为充电模式、工作模式和回充寻找模式,充电模式和回充寻找模式的布置与 表1一致。在工作模式时只进行辐射骚扰的测量,布置见图 5。
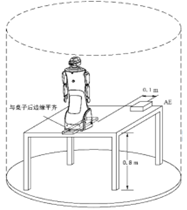
图5 a)台式移动服务机器人的布置图
注:1. 服务机器人放置在桌子中间,并与桌子后边缘平齐。
2. 服务机器人辅助设备放置于服务机器人一侧,并与服务机器人侧面至少 0.1 m。
3. 服务机器人放置在绝缘木板上,被支撑起来,绝缘木板的厚度至少使服务机器人悬空,并保持稳定
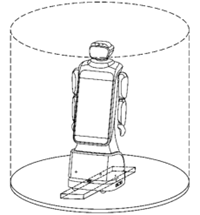
图5b) 落地式移动服务机器人的布置图
注:服务机器人放置在绝缘木板上,被支撑起来,绝缘木板的厚度至少使服务机器人悬空,并保持稳定
6,谐波电流
输入电流不大于 16 A 的服务机器人谐波电流发射应符合 GB 17625.1 的要求
输入电流大于 16 A 的服务机器人谐波电流发射应符合 GB/T 17625.8 的要求
7,电压波动与闪烁
额定电流不大于 16 A的服务机器人电压波动与闪烁限值应符合 GB/T 17625.2 的要求
额定电流大于 16 A 的服务机器人电压波动与闪烁限值应符合 GB/T 17625.7 的要求
8,结束语
本文基于GB/T 37284-2019讨论了服务机器人的EMI测试方法。综合看来,服务机器人的测试融合采纳了家电测试标准和通用标准之要求。
a) 固定式服务机器人:
应在工作模式下进行全部项目的测试。应按照正常工作状态下进行测量,模拟固定服务机器
人正常工作,如有提供服务的辅助设备。应包含在测试中,测试时,充电电缆或者充电器应参
考实际使用要求考虑是否接入。
b) 移动服务机器人:
应在充电模式、工作模式及回充寻找模式下分别进行测试,测试项目为:
充电模式(本体十充电器): 谐波电流、电压波动与闪烁、传导骚扰、辐射骚扰:
工作模式(本体): 辐射骚扰;
回充寻找模式(本体十充电器): 谐波电流、电压波动与闪烁、传导骚扰、辐射骚扰
由于笔者能力所限,文中难免有差错,欢迎同好们来世纪汇泽共同探讨。
若需要了解更多关于电磁兼容检测仪器的相关信息,可访问公司网站http://www.emc-mall.com/查看。